有鑑於這幾年在用ROS時不時會上來查詢一些筆記,決定壓線參加鐵人賽提供一些自己在使用ROS2及Porting from ROS to ROS2上的心得和筆記回饋給這個社群。這邊特別Shout out to 蛤,他的ROS文章很簡單易懂,每天的題目也很切分的很剛好,很常上來複習他的筆記,這邊推薦給要學ROS的人。這次鐵人也會參照他的主題分類。
雖然碩論專題就是寫和無人機自動控制和Mapping,不過當時不知道ROS,被老闆說服自己用C++手刻Socket, OpenGL, ImGUI, Mapping Algorithm等等,刻出訊息交換、資料視覺化和3D UIUX,現在想想還真瘋XD 雖然現在coding技術應該在那時之上了,但不依靠ROS寫出一個無人機(機器人)專案真的太殘忍,所以這邊想讓大家可以更快上手ROS2,降低入坑恐懼。
警語:ROS2雖然宣稱可以支援其他平台,但是目前除了Windows的Sublinux有裝起來外,MacOS和原生Windows的設定都滿複雜還有很多版本限制,非常不建議使用Linux(Ubuntu, Mint, CentOS,etc.)和WSL以外的作業系統
Robot Operating System(又稱ROS),雖叫作業系統,但許多人更習慣稱他為Middleware,比較像是介面的工具,又或是社區的告示排,可以讓不同的Node(節點)可以彼此溝通。Node是ROS中的程式基本單元,當然程式可大可小,就看開發者如何設計了,具體細節會在ROS Node的章節更詳細介紹。
實際應用上的例子以經典自走車為例,Sensor偵測到前方障礙物時,會拋訊息到ROS Server上,而車輛的馬達控制系統會去ROS Server上找障礙物訊息,看到有障礙物的訊息時就煞車。當然因為ROS Server是告示排,所以大家都可以去看。譬如警報器系統也會去ROS Server找障礙物訊息,找到的話會發出警告聲響。這個被稱之為Master-Client的架構,由ROS Master為中心,而各個程式則為繞著他。
下圖[from Robotics Back-End]是一個很經典的範例:相機用Python讀進來,Motion Planning在背景跑,還有Python的搖桿控制系統,最後是用C++輸出到馬達上驅動小車。而圖中的ROS辦演著訊息交換的角色。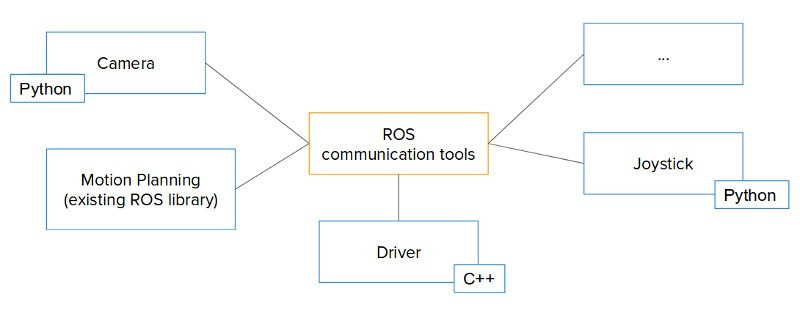
ROS是早在2007年Standford University機器人研究室就推出的,目的是為了解決機器人過於龐大且多元的領域造成知識上的隔閡。像是路徑規劃和馬達控制的溝通,在兩組專業人馬眼中或許都不算太難,但是到了要整合時,往往兩方過於獨立作業造成訊息格式、原理等不相同,最終要打掉重練的悲劇。
有了ROS架構,開發者可以專注於開發程式,並留意訊息交換格式即可與其他程式對接,不懂具體細節原理也沒關係。在這樣的生態系之下,開源的ROS底下有許許多多實用的Packages,讓機器人更複雜卻更易於管理和發開。套句ROS開發者常説的話,站在巨人的肩膀上
然而隨著時間的演進,ROS的底層架構開始跟不上時代的潮流。因為底層是依靠網路溝通,Socket中的UDP,TCP等架構會有延遲等問題,造成無法符合real-time operating system (RTOS, 時時作業系統)的規範。這個架構在系統小、訊息頻寬可以負荷時並沒有太大的問題,但在系統變複雜、訊息量變多後就顯的不堪負荷,Queue常常會延遲甚至掉訊息。於是ROS在一連串的更新後ROS迎來最後一個版本Noetic,之後便進入了ROS2的時代。

ROS2的目標就是實現RTOS,具體上就是利用Data Distribution Service (DDS)的架構重新建構底層訊息交換機制,引入Quality of Service (QoS) 的設定,可以在不同情境下設定訊息的品質、歷程、Delay等等。另外跨裝置的設定也在ROS2後變得更容易,且得意於QoS,跨裝置的訊息交換也得到提昇。
Exploring the performance of ROS2論文中的架構圖可以看到兩者的差異: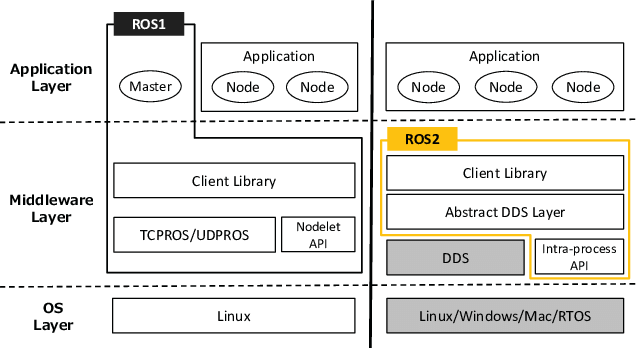
圖上也會發現ROS2不再有Master-Client的關係,取而代之的是每個Node可以獨立運作而不再需要ROS Master。等於是ROS2放棄原本維護的網路架構而採用較為成熟的DDS架構,將經歷花在中上層串接API的部份。
最後的最後雖然沒有明文寫出來,ROS2上採用大量的Smart Pointer來避免Context Overwrite的情況,雖然對C++初學來說門檻會比較高,但是對程式的穩定度會有一定的加分,Python的部份則是沒有太多改動,畢竟只有物件可以使用XD
會在每個章節說明ROS2 Porting的部份,最後希望可以弄一個Cheatsheet方便大家查詢。
完蛋,打完手在抖,不曉得可以講完多少XD
這邊特別感謝以下網站讓我的筆記更完整:
ROS2官方教學:https://docs.ros.org/en/foxy/Tutorials.html
ROS2 Github範例: https://github.com/ros2/examples
ROS Wiki: https://en.wikipedia.org/wiki/Robot_Operating_System
蛤ROS自學筆記:https://ithelp.ithome.com.tw/users/20112348/ironman/1965
郭鎮穎學習筆記:https://hackmd.io/@evshary/ROS2Note/https%3A%2F%2Fhackmd.io%2F%40evshary%2FAboutMe
What is ROS? https://roboticsbackend.com/what-is-ros/
Exploring the performance of ROS2: Maruyama, Yuya, Shinpei Kato, and Takuya Azumi. "Exploring the performance of ROS2." In Proceedings of the 13th International Conference on Embedded Software, pp. 1-10. 2016.
THE ROS 1 VS ROS 2 TRANSITION: https://www.swri.org/industry/industrial-robotics-automation/blog/the-ros-1-vs-ros-2-transition


 iThome鐵人賽
iThome鐵人賽